 400-099-1872
400-099-1872





视频请关注B站:https://www.bilibili.com/video/BV1AagqzpEM7/
演讲题目:具身智能的生成式设计
演讲者:宋舒然
RSS 2025,美国加利福尼亚州洛杉矶。
具身智能的通用设计:机器学习赋能机器人硬件
核心理念
具身智能强调智能体需通过物理身体(机械结构、感知、驱动)与环境交互实现智能。传统“分而治之”设计模式(硬件/软件分离优化)易导致系统性能瓶颈,因专家难以精通全流程。机器学习(ML)提供新范式:统一设计工具,实现硬件与软件的协同优化。
ML驱动硬件设计的可行性
ML具备两大关键能力:
1. 知识提炼:从海量仿真/实验数据中学习硬件设计规律;
2. 参数优化:自动搜索最优硬件配置(如几何参数),其优化逻辑与策略学习相通。
目标:工程师定义任务目标与设计空间,ML自动输出最优硬件+软件系统。
---
案例:末端执行器智能设计
研究一:Free2Form(抓取对抗性物体)
- 任务:优化平行夹爪指形几何,实现鲁棒抓取。
- 方法:生成网络(3D CNN)输出夹指体素模型;
评估网络预测抓取性能(成功率、稳定性、位姿容错);
端到端梯度优化生成网络。
- 成果:设计性能优于传统压模夹爪;
网络自主学习策略:单侧凹陷结构(平坦面推物体入凹槽)、动态钩挂(夹合中钩住物体)。
研究二:动态引导扩散模型(复杂交互任务)
- 任务:设计实现“收敛”等反直觉任务的夹爪(如多次夹合使物体自动对齐目标位姿)。
- 方法升级:生成器:扩散模型 + 3D控制点表示(降低维度);
评估器:动态网络预测“交互轮廓”(物体位姿变化的高维映射),支持多任务复用。
优势:单一模型可设计旋转、平移等多样化任务的专用夹爪。
关键启示与拓展方向
1. 设计范式:生成网络压缩设计空间(CNN/扩散模型);
评估模型将非可微目标(抓取性能、交互效果)转化为可优化函数。
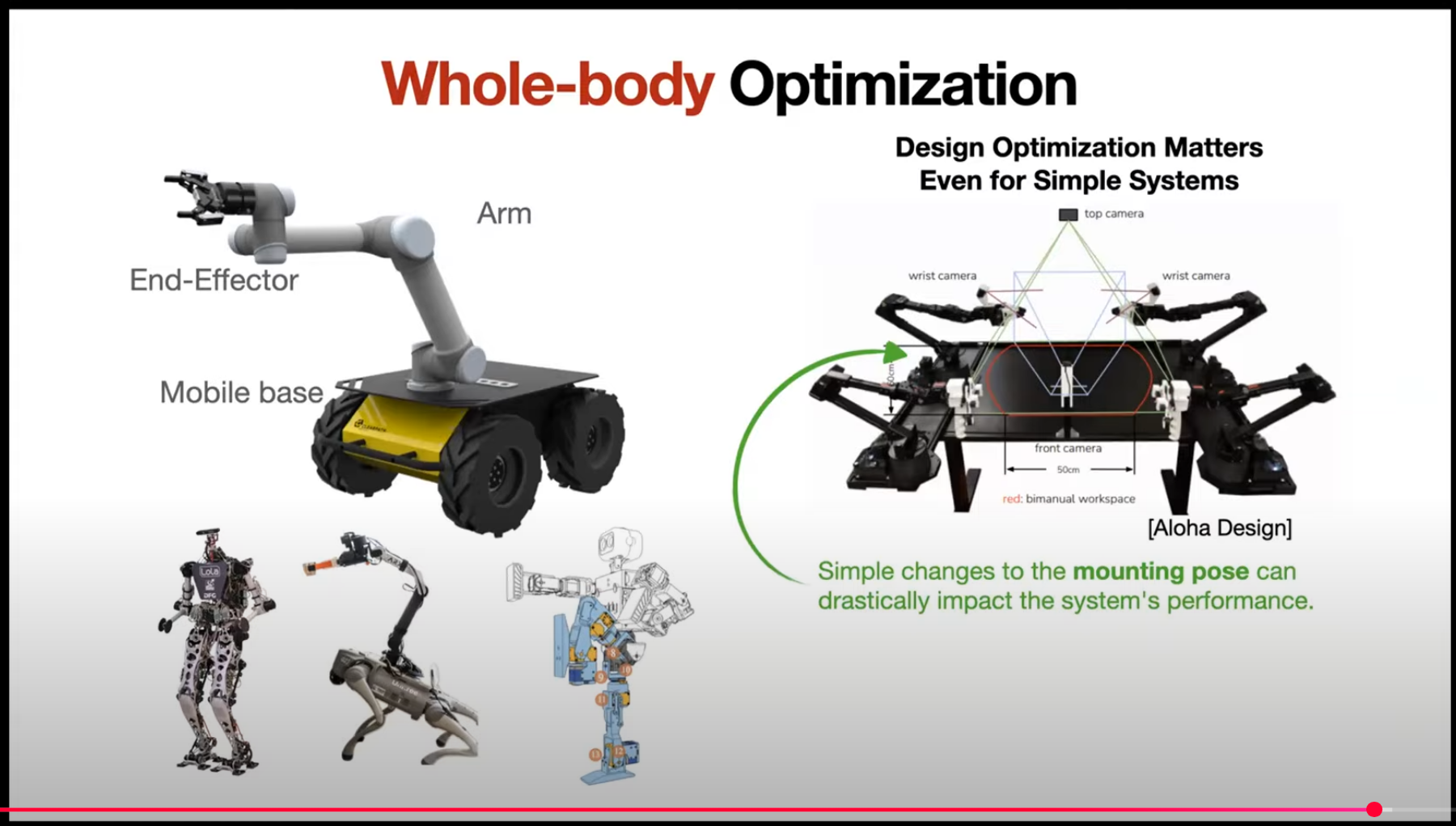
2. 全身协同优化:优化自由度配置、关节位置、非对称结构(如Aloha机器人双臂布局);
传感器优化案例:主动视觉(动态调整视点)、多摄像头融合(“Robot Canopy”实现狭小空间作业)。
3. 未来愿景:硬件即行为**:打破“固定硬件+学习策略”传统,协同优化软硬件;
通用适应性**:机器人通过动态调整身体(如变形金刚)应对多任务与环境变化。
专用 vs 通用设计之辩
专用设计:为特定任务定制,性能极致但成本高(如工业抓手);
通用设计:满足80%需求,性价比更高(如消费级产品)。
平衡点:ML可快速生成专用设计,降低定制成本;通用平台则需在性能与泛化间权衡。
总结
ML为机器人具身化设计开辟新路径:通过**学习设计空间与可微目标建模,实现硬件自动化优化。未来需推动从“软件学习”到“软硬协同”的范式变革,构建更适应、强韧、通用的机器人系统。
| 产品名称 | 京东店铺 |
| 智能佳ToddlerBot 开源仿人机器人平台 AI 机器自学习 具身智能机器人 数据采集 斯坦福可复现科研机器人 ToddlerBot 完整组装版 |
https://item.jd.com/10137610333552.html |
| ROBOTIS 机器人舵机DYNAMIXEL 机器人关节 机械臂电机 机器人配件 伺服舵机 原装进口 |
https://mall.jd.com/view_search-370952-8052179-1-1-24-1.html |
| 智能佳(ZNJ)ORCA 开源仿人灵巧手 低成本 17自由度 工业级耐久 仿真到现实 持续灵巧任务学习 教育与研究 ORCA Hand 完整组装版 |
https://item.jd.com/10161202039459.html |
您对此产品感兴趣,请联系我们!
智能佳机器人
400 099 1872
010-82488500/82488501
www.bjrobot.com
京东店铺:智能佳机器人专营店 - 京东 (jd.com)
淘宝店铺:首页-智能佳机器人-淘宝网 (taobao.com)
企业淘宝:首页-智能佳机器人官方店铺-淘宝网 (taobao.com)

