 400-099-1872
400-099-1872






RM-P60-RNH机械臂(套装版)用户可编程的开源机械手系统
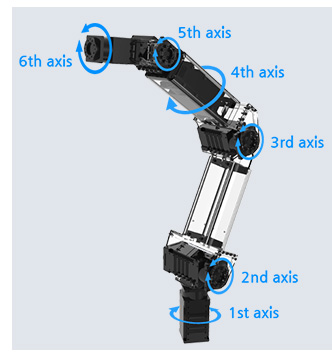
产品名称:OpenMANIPULATOR-P
型号名称:RRM-P60-RNH+底座+机械手+摄像头
- 用户可编程的开源机械手系统
- 易于维护和定制的模块化平台
- 无外部控制箱,重量/负载比高
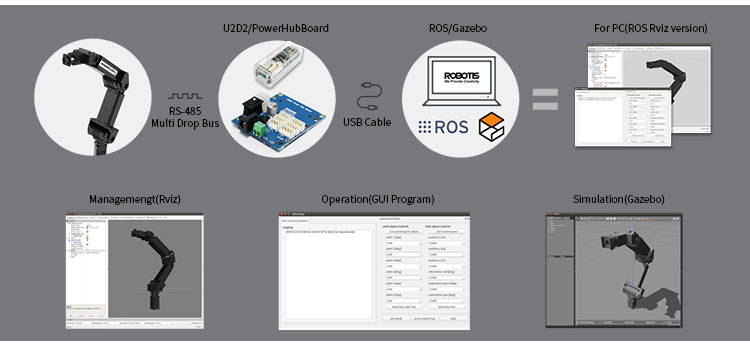
· 基于集成软件的ROBOTIS机械手控制器套件;
· OpenMANIPULATOR-P库(运动学,轨迹和Dynamixel控制器);
· GUI程序包,用于设置和监视控制参数;
· MoveIt!OpenMANIPULATOR-P的软件包;
· 基于Gazebo Simulator的仿真包;
· 键盘和操纵杆的遥控操作示例;
研究目的

DYNAMIXEL-P的功能
多合一模块化设计
直流电机+控制器+驱动器+传感器+摆线
针轮减速机;
紧凑
轻巧的摆线针轮减速机使模块尺寸最小。
高输出重量比(0.05Nm / g)
高抗冲击性(超过400%)
高精度和低反冲
非接触式(磁性)绝对编码器(通过
AMS)和增量编码器,用于精确定位;
提供的性能数据由韩国实验室认可计划
(KOLAS)测试;
基于电流的转矩控制
高速电流感应算法和电流反馈控制;
三环控制,用于电流,速度和位置反馈。
用户友好的开发环境
提供基于C语言的库;
各种解决方案示例(C ++,LabVIEW,C#,eclipse,JAVA等)。
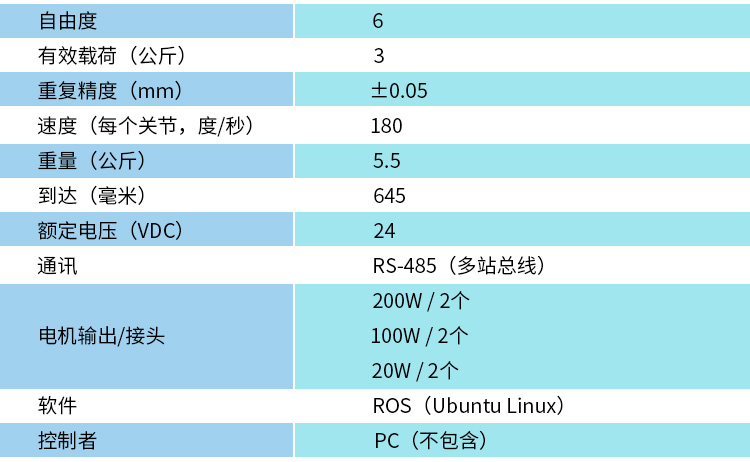
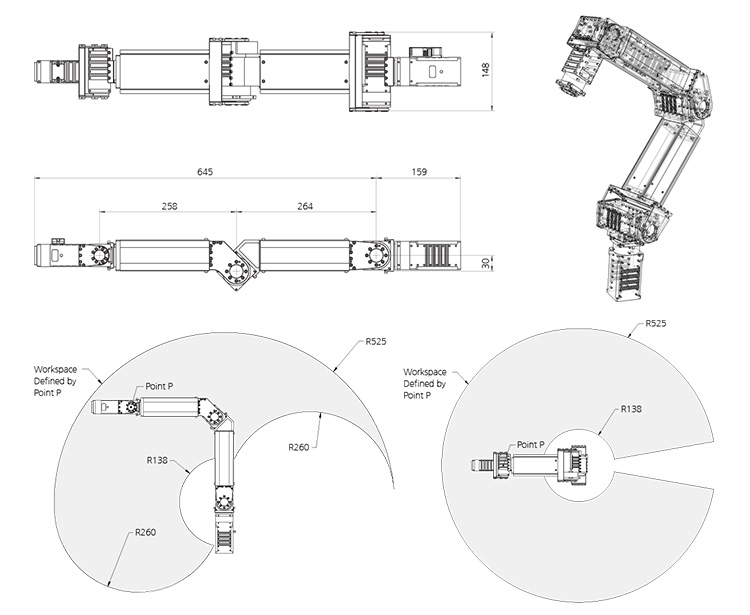
硬件参数
包装组件
*注意:不含控制器或电脑,此手臂适合电脑或工控机控制。
*请根据您的使用环境单独购买 。
出厂默认设置
| ID | 1 |
| 波特率 | 57600 bp |
相关产品推荐


