 400-099-1872
400-099-1872






视频请观看B站:https://www.bilibili.com/video/BV1ocET68EKm/
智能佳机器人(www.bjrobot.com)——ROBOTIS中国区资深合作伙伴!
智能佳(北京)机器人有限公司作为 ROBOTIS 中国区官方授权经销商,更是 ROBOTIS 在中国区的核心合作伙伴,自 2007 年建立合作以来,始终坚持正规渠道经营原则:公司所售全系列 ROBOTIS 产品均为 100% 官方原装正品,货源链路可全程追溯,在保证官方正品品质与完善售后保障的同时,也具备高性价比优势。
深耕机器人行业多年,智能佳(北京)机器人有限公司配备专业技术服务团队,凭借正规授权渠道与完善的售后服务体系,为客户提供一站式全流程服务支持 —— 涵盖售前选型方案咨询、售后技术问题解答,全方位保障您的采购与使用体验。
如需采购 ROBOTIS 系列产品,建议通过下方官方正规渠道进行购买,切实维护自身合法权益,购物更安心、更有保障。
京东智能佳机器人专营店:http://bjrobot.jd.com
淘宝智能佳机器人店铺:http://bjrobot.taobao.com
淘宝智能佳机器人官方店铺:http://shop240598203.taobao.com/index.htm


产品特点
灵巧且“耐造”的腱驱动
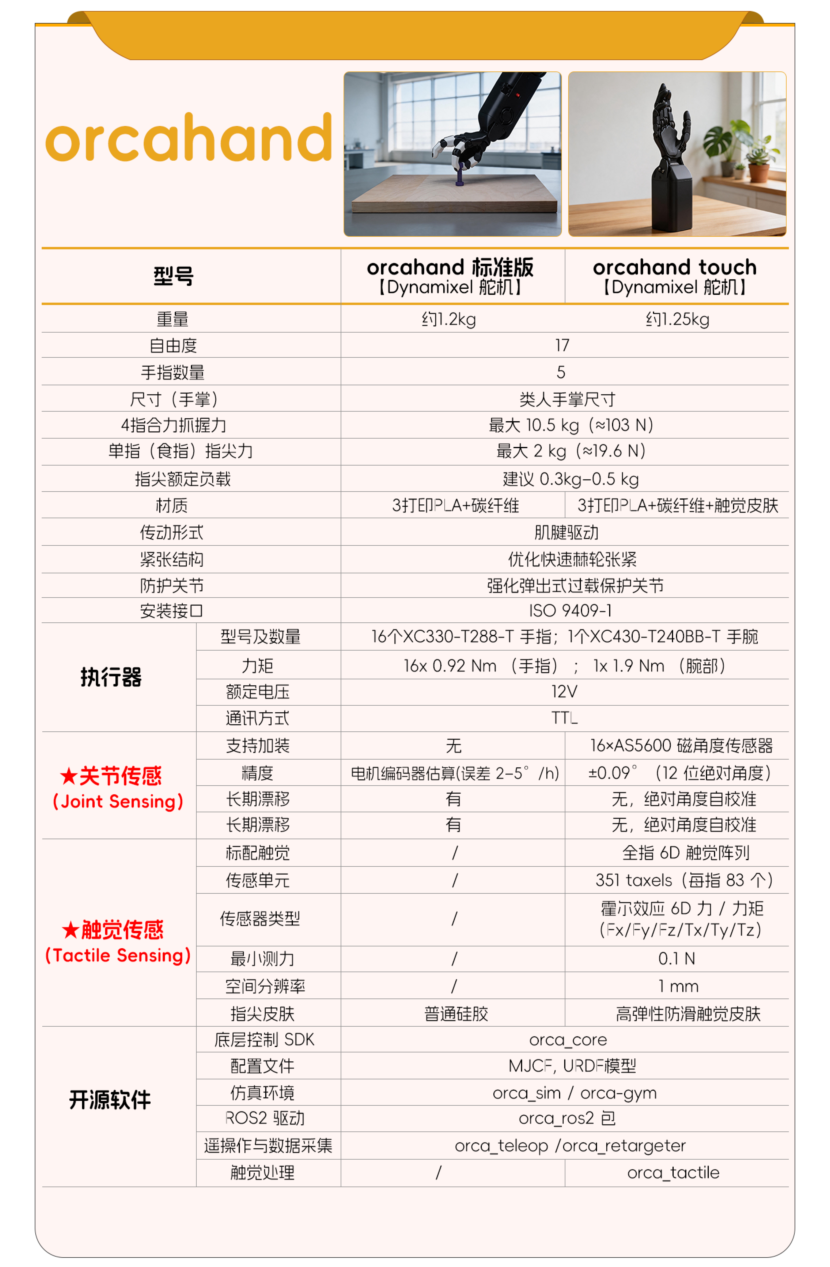
orcahand 灵巧手采用了腱驱动驱动系统,模拟了人类肌肉和肌腱的生物结构。通过将电机集成在底座“动力塔”而非手指内部,该设计实现了极低的手指惯性和纤细的仿入外形。
工业级耐用,支持长时连续学习
产品采用抗磁设计与可靠传动结构,使用寿命超 1000 万次循环,内置散热风扇与自动张紧系统,可支持 7 小时以上无间断学习任务,满足高强度实验、数据采集与模仿学习需求。
全开源生态,开箱即用
orcahand 灵巧手提供开源 Python 控制库、URDF/MJCF 模型、orca_sim仿真环境,支持ROS/ROS2与 LeRobot 工具链,兼容Manus 手套、Rokoko 手套、Apple Vision Pro 等遥操作设备,大幅降低科研部署门槛。
标准接口,快速对接机械臂
采用 ISO 9409-1标准安装面,USB C 直连控制,兼容各类科研机械臂,支持台面、侧装、倒装部署,快速搭建 “移动平台+机械臂+触觉灵巧手+数据手套”一体化具身智能系统。
orcaHand touch 突出特点
通过自动校准实现精准控制
搭载高精度关节角度传感器(Joint Sensing),可直接采集真实关节角度,系统建立了电机位置与关节角度之间的线性映射,彻底消除肌腱拉伸带来的运动漂移与误差。
集成触觉反馈
每指搭载定制霍尔效应三轴触觉传感器(Tactile Sensing),全指尖6D 触觉阵列,351 个高分辨率传感单元每个单元。
| 拇指、小指 | 51 个触觉感知单元 × 六维力 / 力矩检测 |
| 食指、中指与无名指 | 83 个触觉感知单元 × 六维力 / 力矩检测 |
| 单只手总计 | 351 个触觉感知单元,每个单元均可输出完整的六维力/力矩测量值。 |
最小检测力0.1N,空间分辨率1mm,可精准感知压力、滑移、形变,弥补视觉不足。适用于精细操控、接触识别、滑移检测、触觉强化学习等高端机器人具身智能科研场景。
配置清单


技术参数
执行器
orcahand 采用 Dynamixel 舵机串行总线通信,分辨率均为 4,096-step。
Dynamixel舵机 XC330-T288-T (16个手指)+ XC430-T240BB-T(1个手腕)
这是全球多数机器人实验室采用的高端科研级数字舵机。虽然单台成本高,但拥有强大的稳定性以及广泛技术支持、详尽文档及丰富的社区工具。

注意事项
一、产品现状与责任
1. 免责声明:
· 产品处于早期开发阶段,不提供任何质量或可靠性保证。
· 使用风险自负,包括潜在的功能缺陷或安全隐患。
2. 责任限制:
· ORCA Hand不承担因使用产品导致的直接/间接损失(如人身伤害、数据丢失、设备损坏)。
二、许可协议核心条款
A. CAD文件与装配手册(非商业用途)
允许: 个人/教育/研究用途;
非商业性修改与共享(需注明出处);
衍生作品须采用相同许可(BY-NC-SA);
禁止:任何形式的商业使用(包括销售衍生品或实体产品);
逆向工程或用于商业利益;
B. 购买成品/套件(商业许可)
允许: 将实体产品用于商业场景(如研究、产品集成);
禁止:对产品逆向工程、拆卸或复制设计;
基于所购单元分发衍生产品;
转让商业许可(许可与购买单元绑定);
产品含专利技术,未经授权复制可能侵权。
C. 商业使用关键限制
仅官方购买的硬件享有商业使用权;
自行打印的CAD文件/手册不包含商业权利;
修改后的文件不可用于商业目的(除非额外授权);
三、第三方集成
· 与外部设备(机械臂/传感器/VR等)集成时,用户需自行承担风险。
· ORCA Hand不保证兼容性、功能或安全性问题。
· 用户必须负责校准、安装及安全操作。
四、违约与执行
· 未授权商业使用、逆向工程或违规分发将面临法律追责。
· 衍生作品自动继承原许可条款,不可变更。
Orcahand仿人五指灵巧手以仿生腱驱动、开源生态及高密度触觉反馈三大核心优势,为具身智能科研提供了一站式解决方案。
选择智能佳,就是选择放心、专业与可靠!
智能佳机器人
400 099 1872
010-82488500/82488501
www.bjrobot.com

