 400-099-1872
400-099-1872






视频请关注B站:https://www.bilibili.com/video/BV1ZfEkzmEPY/
通用机器人需具备类人的灵巧性与敏捷性,才能匹配人类的操作多样性。类人形态设计更能有效利用人类手部交互产生的海量数据资源。然而,灵巧操控的瓶颈不仅存在于软件层面,硬件层面的挑战更为严峻——现有仿人机械手往往造价高昂、体积笨重或依赖企业级维护,严重制约了其研究与应用普及。试想,若科研人员能在一天内部署可靠的灵巧手系统,将如何推动领域发展?本文提出ORCA仿人灵巧手:这款17自由度肌腱驱动设备集成全触觉传感系统,可在8小时内完成组装,物料清单成本经济实惠。我们展示了弹出式关节、自动校准系统、张力调节系统等创新设计特征,这些机制在显著降低系统复杂度的同时,提高了可靠性、精度与鲁棒性。通过遥操作、模仿学习到零样本模拟到真实强化学习等多层次任务测试,我们对ORCA进行系统性性能评估。实验表明,该设备可承受超过一万次循环测试(约20小时持续运行),展现出工业级耐久性。项目CAD图纸、源代码及技术文档已开源(访问地址:docs.orcahand.com)。
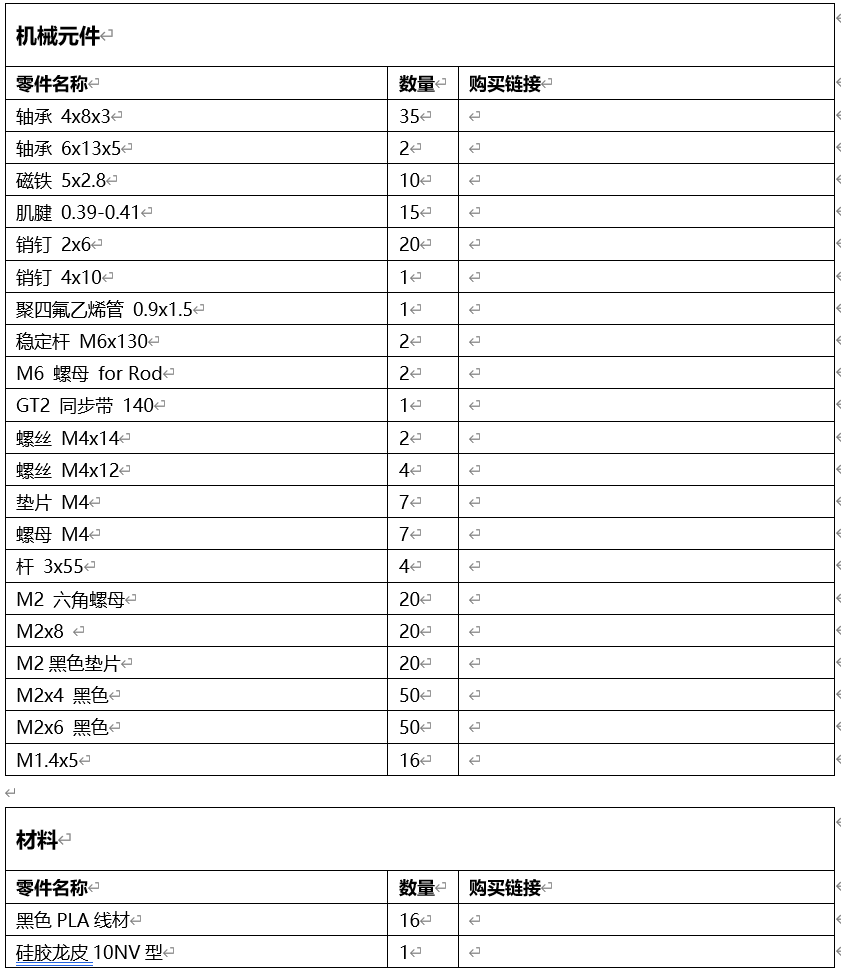
配置清单
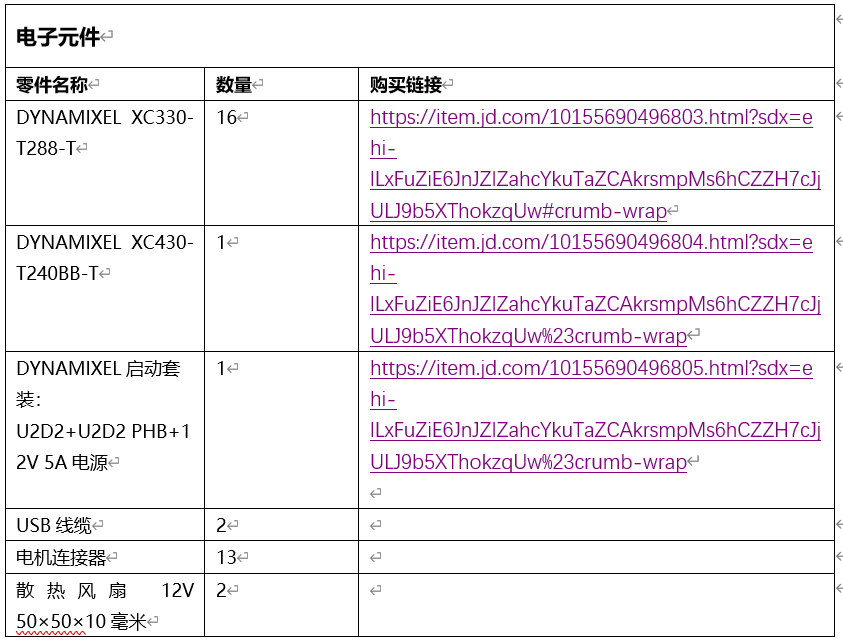
ORCA v1 仿人机械手

ORCA v1 机械手是一款腱驱动、拟人化的机器人平台,旨在紧密复现人类手部的结构与运动方式。它具有17个自由度——其中16个位于手指,1个位于腕部——能够执行多种灵巧的操作任务。该设计在功能性、可靠性和可及性之间实现了平衡。
开源性:所有设计文件(STL模型)、控制软件、材料清单和分步组装说明(含视频教程)均将公开提供。该项目旨在鼓励研究人员、教育工作者和爱好者进行复制、定制与实验探索。
可靠性:ORCA机械手通过多项设计增强耐用性与寿命。其关节采用过载安全脱位而非断裂的保护机制,既能避免部件损坏又便于维修。自动校准系统、绕关节旋转中心布置的低摩擦腱传动路径,以及模块化结构设计共同保障了性能稳定与长期可用性。
经济性:该机械手以3D打印为核心设计理念,总材料成本经济。所有结构件均可通过标准3D打印机完成制造,其余现成零件也易于在线采购,确保各类用户均可轻松获取。
拟人化:ORCA v1严格遵循人类手部比例与关节分布,配备可对向运动的拇指和主动驱动腕关节。其复现了包括掌指关节(MCP)、近端指间关节(PIP)和外展关节(ABD)在内的人类手部生物力学结构,不仅能操控专为人手设计的日常工具物品,还可实现类人灵巧度的多样化操作任务。这种拟真结构还大幅简化了遥操作/动作重定向流程,并使其能直接利用人类手部数据进行算法训练。
这些特性使ORCA v1机械手成为兼具实用性与拓展性的研究平台,为机器人操控技术探索及人机协作开发提供了理想的实践载体。

全开源平台
ORCA v1是一款完全开源的机器人灵巧手,所有设计文件(STL格式)、核心控制代码和适合初学者的文档即将发布于docs.orcahand.com。该平台将提供关键资源,包括分步组装说明、维修指南和视觉参考材料,以支持研究场景中的便捷复现与集成。为确保可及性,其设计采用非专利且广泛可得的材料,并配有持续更新的完整物料清单(BOM),附带直接采购链接。凭借低成本、简易性和模块化优势,该设备特别适合作为教育机构与实验室的实用工具,尤其适用于机器学习操控模型的开发与基准测试。通过提供共享化、标准化且易获取的硬件平台,ORCA有力促进了科研成果的可复现性,加速跨机构协作,使机器人学界能够共建数据集、对比控制策略并突破灵巧操控的边界。项目采用非商用的MIT许可协议与知识共享许可协议,积极鼓励开源贡献与知识共享。
7小时无间断模仿学习
为彰显ORCA v1硬件平台的可靠性,我们设计了一个持续抓取-放置评估任务。机械手需要从桌面上抓取立方体并将其放置于滑动表面,该操作会导致立方体随机滑落回桌面,从而自动重置实验环境。通过模仿学习训练多种策略后,我们选取最优策略在ORCA机械手硬件上进行了7小时17分钟(约2000次抓取循环)的无人值守持续运行测试,过程中仅在辅助抓放任务中进行极少干预。整个测试期间策略保持稳定性能表现,未出现肌腱松弛或断裂情况,实验终止并非由于系统故障,而是基于其已充分证明平台在长时任务中的可靠性、鲁棒性和有效性。ORCA机械手无需人工干预即可持续数小时可靠执行精细操作的能力,有望加速灵巧操控研究在现实世界的强化学习应用落地。

视频请关注B站:https://www.bilibili.com/video/BV15xEkz3EGX/
零样本仿真到现实强化学习
我们展示了利用仿真环境中的强化学习训练orca灵巧手在现实世界完成复杂操作任务的过程。通过IsaacGymEnvs封装环境,我们采用优势演员-评论家架构并行训练了4,096个仿真orca手模型,实现网球在手掌内的重定向控制。结合领域随机化技术,经过仅1小时的训练后,成功将鲁棒的策略从仿真环境迁移部署到物理orca手上,使其能够可靠地沿指定旋转轴重新定向网球。
可靠性验证实验
为评估ORCA灵巧手在长时任务中的可靠性与鲁棒性,我们进行了持续2.5小时的手部关节驱动实验。实验中在手掌固定毛绒玩具,要求手部每4秒执行一次全指抓握动作。同时为测试腕关节耐久性,每16秒进行40?幅度的腕部屈伸运动。结果表明,手部在2,250次抓握循环中始终保持稳定抓取,未出现机械故障、电机停转或肌腱松弛积累现象。持续2.5小时的关节运动中,各电机最大电流值保持基本稳定,进一步验证了手部机械结构的鲁棒性、关节运动的高重复性及长时间持续运行能力。值得说明的是,实验并非因系统失效终止,而是通过2.5小时无故障运行充分验证了系统可靠性后主动结束。
精度实验
精准的关节运动控制对于任何灵巧操作任务的可靠性能都至关重要。此外,动作指令与实际执行之间的过度延迟会严重影响闭环控制行为的实施。通过在仿真训练中将延迟纳入机械手模型,有助于弥合仿真与现实(sim2real)的差距。为了进一步验证ORCA手的可靠性,我们对其关节跟踪多样化动作指令的精度和延迟进行了基准测试。本文提出了一种基于AprilTags的通用实验方案,用于评估机械手的精度和延迟性能。随后,我们通过对比ORCA手与LEAP手的测试数据,以腱驱动系统的动力学特性为基准,评估直接驱动机器人手的动态表现。在每次测试前,我们利用ORCA手的自动校准机制消除可能存在的肌腱长度变化或累积松弛。实验表明,通过自动校准,ORCA手的手指关节能够精确跟踪正弦指令输入。值得注意的是,在保持与LEAP手相当精度的同时,得益于创新的腱驱动执行机构设计,ORCA手实现了更为紧凑的结构形态。
快速便捷组装
ORCA手的设计兼顾了易组装与可维护性。在备齐所有机械部件的情况下,单人可在8小时内完成整只ORCA V1手的组装(含集成传感器、预紧肌腱及柔性皮肤)。团队投入大量时间开发了详尽的组装指南(docs.orcahand.com),涵盖全流程图文说明与视频教程。特别设计的"可弹出式"关节简化了组装与维修流程——关节在负载下可安全脱位而非断裂,从而减少停机时间并延长硬件寿命。由于所有部件均为3D打印,损坏后均可轻松替换。这些特性使得ORCA手成为机器人实验室、教育机构及爱好者的理想选择,助力用户以高性价比的开源方案打造可靠机器人项目。
**参考文献**
如使用本研究成果,请引用以下BibTeX条目:
@misc{christoph2025orcaopensourcereliablecosteffective,
title={ORCA: An Open-Source, Reliable, Cost-Effective, Anthropomorphic Robotic Hand for Uninterrupted Dexterous Task Learning},
author={Clemens C. Christoph and Maximilian Eberlein and Filippos Katsimalis and Arturo Roberti and Aristotelis Sympetheros and Michel R. Vogt and Davide Liconti and Chenyu Yang and Barnabas Gavin Cangan and Ronan J. Hinchet and Robert K. Katzschmann},
year={2025},
eprint={2504.04259},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2504.04259},
}
|
|
|
| 智能佳(ZNJ)ORCA 开源仿人灵巧手 低成本 17自由度 工业级耐久 仿真到现实 持续灵巧任务学习 教育与研究 ORCA Hand DIY组件 |
https://item.jd.com/10155690496802.html?sdx=ehi-lLxFuZiE6JnJZIZahcYkuTaZCA4rsmpMs6hCZZH7cJjULJ9b4HvmrUnnUA#crumb-wrap |
您对此产品感兴趣,请联系我们!

