 400-099-1872
400-099-1872





非凡灵巧?掌控入微|ROBOTIS HAND HX5 五指灵巧手重磅发布,重新定义机器人精细操控
智能佳机器人(www.bjrobot.com)——ROBOTIS中国区资深合作伙伴!
智能佳(北京)机器人有限公司作为 ROBOTIS 中国区官方授权经销商,更是 ROBOTIS 在中国区的核心合作伙伴,自 2007 年建立合作以来,始终坚持正规渠道经营原则:公司所售全系列 ROBOTIS 产品均为 100% 官方原装正品,货源链路可全程追溯,在保证官方正品品质与完善售后保障的同时,也具备高性价比优势。
深耕机器人行业多年,智能佳(北京)机器人有限公司配备专业技术服务团队,凭借正规授权渠道与完善的售后服务体系,为客户提供一站式全流程服务支持 —— 涵盖售前选型方案咨询、售后技术问题解答,全方位保障您的采购与使用体验。
如需采购 ROBOTIS 系列产品,建议通过下方官方正规渠道进行购买,切实维护自身合法权益,购物更安心、更有保障。
京东智能佳机器人专营店:http://bjrobot.jd.com
淘宝智能佳机器人店铺:http://bjrobot.taobao.com
淘宝智能佳机器人官方店铺:http://shop240598203.taobao.com/index.htm

视频请观看B站:https://www.bilibili.com/video/BV1fUQxBKEpo/
随着具身智能(Embodied AI)技术的飞速发展,机器人末端执行器的灵巧度成为决定其能否真正融入人类工作场景的关键。
ROBOTIS HX 系列高自由度五指灵巧/机械手,以 DYNAMIXEL 智能舵机为核心,融仿人手结构与前沿物理 AI 技术于一体,重新定义机器人操控未来!精准感应物体材质与形状,突破传统抓取局限,凭超高灵巧性完成各类复杂精细操作,专为 AI Worker/OMY平台量身打造。
核心技术亮点
20 自由度高灵巧架构
HX5?D20 采用 20 自由度设计,单指 4 自由度,可高度还原人手关节运动,实现灵活屈伸、对掌、捏持等精细动作,轻松完成精密抓取与稳定操控。
直驱式智能舵机驱动
手指各关节搭载XM335?T323?T 专用舵机直驱,金属齿轮与金属外壳保障耐用性,减小齿隙、提升稳定性,简化控制逻辑,长期反复运行可靠不掉链。该舵机支持电流 / 速度 / 位置等六种控制模式,适配多样化控制需求。
全指尖触觉传感系统
全指尖集成触觉传感器,实时检测接触压力与抓握状态,自适应调节力度,安全稳定夹持易碎件、精密件等不同材质物体,兼顾柔性与精度。
深度适配 AI 生态
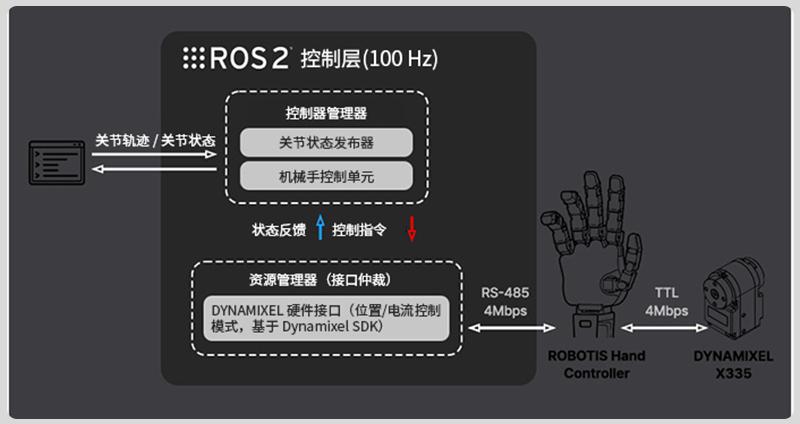
HX5 灵巧手专为 AI Worker/OMY 平台量身打造,支持 ROS2 生态系统,并完美适配 Gazebo/RViz 仿真环境(支持 URDF/SDF 格式)。它还支持遥操作采集,配合开箱即用的 AI Worker with HXS-D20 方案,大幅降低了开发门槛。
产品型号

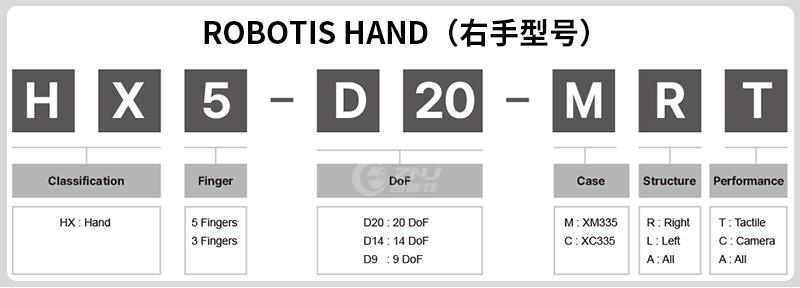
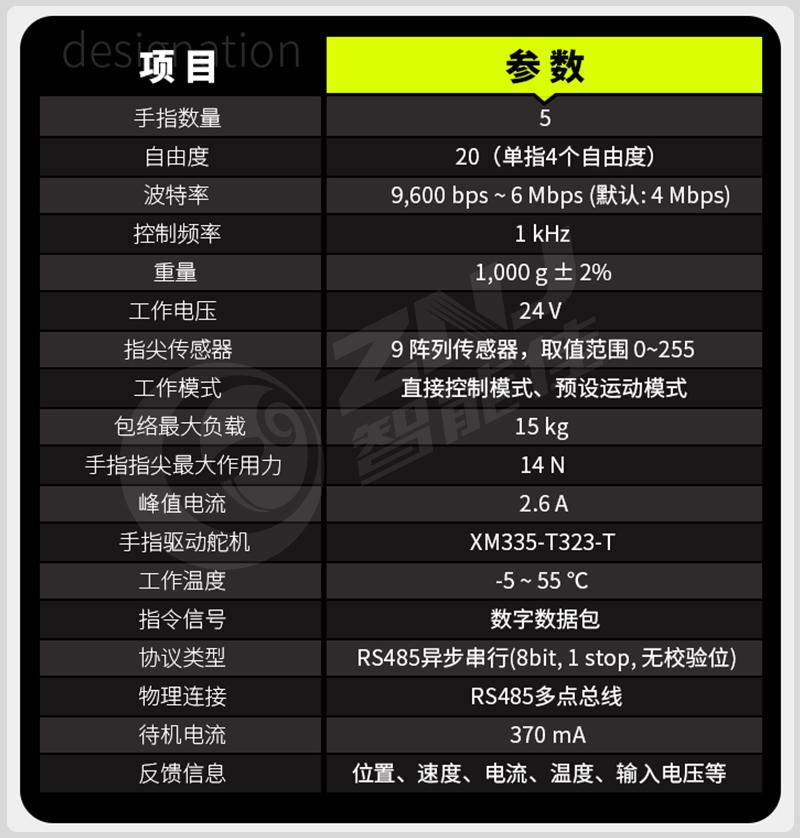
HX5-D20规格与配置
产品组件

| HX5-D20-MLT:1台(成品装配) |
| FRP42_A110_K:1 |
| CABLE_4P_180MM :1 |
| CABLE_4P_300MM:1 |
| CABLE_KW30-3P-1C_35MM :1 |
| CABLE_KW30-3P-1C_55MM :1 |
| CABLE_KW30-3P-1C_80MM:1 |
| WB M3x8:20 |
可选配件说明:请注意,开关电源(SMPS)及 U2D2 PHB 套装(DYNAMIXEL 专用外部电源集线器)未包含在基础包装内,您可根据实际使用环境单独选购。
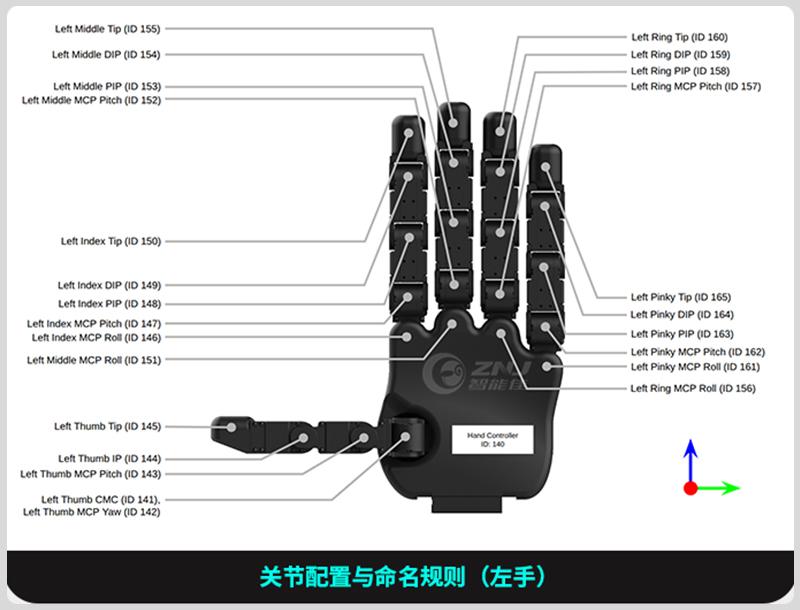
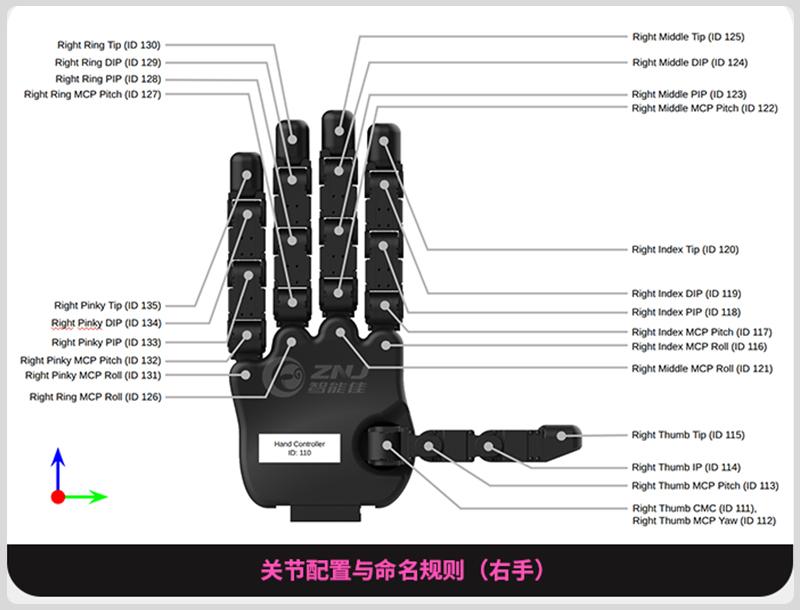
Robotis Hand 驱动硬件要求
| 硬件名称 | 数量 | 说明 |
 HX5-D20 |
1 |
ROBOTIS Hand |
 U2D2(需单独购买) |
1 |
U2D2 是一款小型 USB 通信转换器,可通过电脑对 DYNAMIXEL 舵机进行控制与操作。 |
 SMPS(需单独购买) |
1 |
电源及电池充电装置(推荐 12V) |
 SMPS(需单独购买) |
1 |
U2D2 电源集线器板可与 U2D2 搭配使用,为 DYNAMIXEL 舵机提供多种外部电源供电。 |
 4-pin 机器人专用线缆 (需单独购买) |
2 |
DYNAMIXEL 专用 RS-485 通信 4p 线缆套装。 |

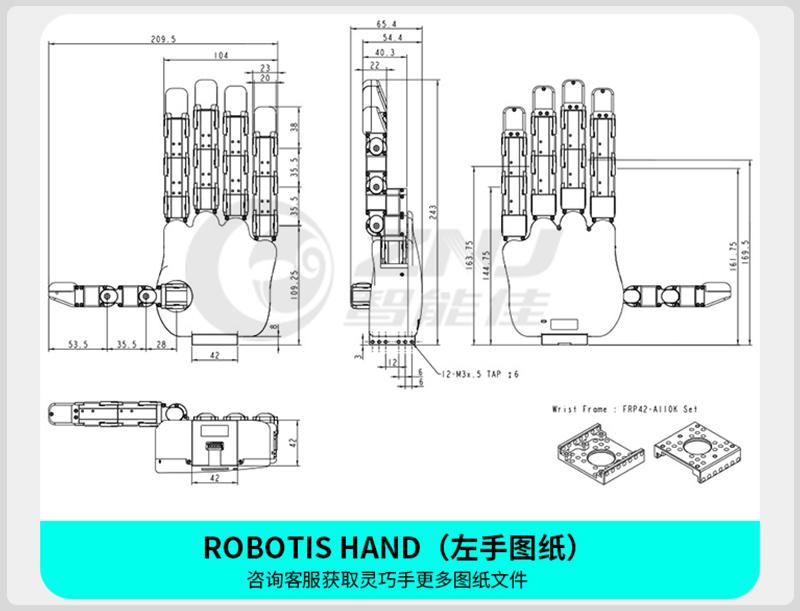
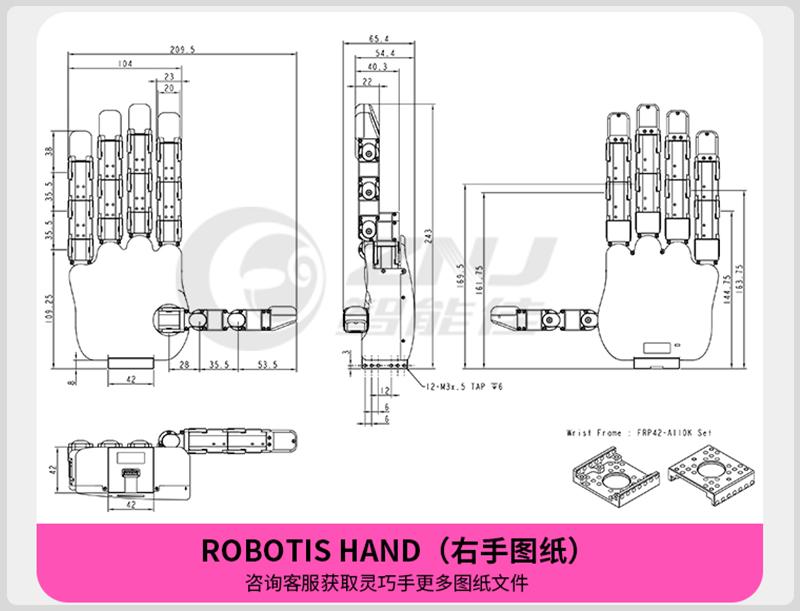
图纸
软件
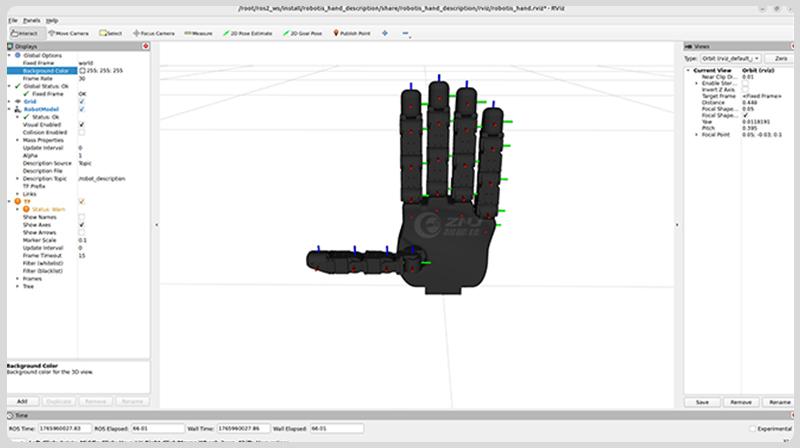
仿真
ROBOTIS HAND 仿真环境是一个在部署前用于全面测试和验证灵巧手性能的虚拟平台。它基于 ROS 2等标准工具构建,提供多种实现方案。
该环境支持以下主要仿真方式:Gazebo / RViz (URDF/SDF)
平台提供 URDF 和 SDF 格式的完整模型,包含移动底座、双臂及传感器。这些模型用于在 Gazebo 中进行物理仿真,并在 RViz 中实现三维状态与数据可视化,以支持集成化功能测试。
ROBOTIS HAND 手指驱动舵机

XM335型号是一款专为机器人手指设计的专用执行器,支持电流控制、基于电流的位置控制及 RC 协议在内的六种控制模式,可高效适配各类应用场景。
* 注意:推荐工作电压为直流 11.1 V,使用时请务必注意操作安全。
* XM335 系列产品结构紧凑、重量轻便,可轻松适配各类超狭窄安装空间。
* 采用金属齿轮与金属外壳设计,大幅提升产品耐用性。
- 多种运行模式
- 速度控制、位置控制、扩展位置控制、PWM 控制、电流控制、基于电流的位置控制轮廓控制,实现平滑运动规划
- 输入电压:6.5 V~12.0 V(推荐 11.1 V)
- 搭载金属齿轮与轴承,提升耐用性
- 原生支持遥控协议,无需额外转换设备
- 低电流设计,实现节能运行
| MCU | ARM CORTEX-M0+ (64 [MHz], 32Bit) |
| 位置传感器 | 非接触式绝对编码器 (12Bit, 360 [°]) |
| 电机 | 无芯直流电机 |
| 波特率 | 9,600 [bps] ~ 4 [Mbps] |
| 控制算法 | PID 控制 |
| 分辨率 | 4096 [pulse/rev] |
| 操作模式【1】 |
电流控制模式 速度控制模式 位置控制模式(0~360°) 扩展位置控制模式(多圈) 基于电流的位置控制模式 PWM 控制模式(电压控制模式) |
| 重量 | 27 [g] |
| 尺寸 (W x H x D) | 19.0 x 35.0 x 22.0 [mm] |
| 减速比 | 323.04 : 1 |
| 失速扭矩 |
0.85 [N.m] (at 9.0 [V], 0.61[A], 1.397 [N.m/A]) 1.03 [N.m] (at 11.1 [V], 0.80[A], 1.290 [N.m/A]) 1.12 [N.m] (at 12.0 [V], 0.88[A], 1.274 [N.m/A]) |
| 空载转速 |
43 [rev/min] (at 9.0 [V]) 53 [rev/min] (at 11.1 [V]) 57 [rev/min] (at 12.0 [V]) |
| 工作温度 | -5 ~ +70 [°C] |
| 输入电压 | 6.5 ~ 12.0 [V] (推荐 : 11.1 [V]) |
| 指令信号 | 数字数据包 |
| 通讯信号 |
TTL 电平多点总线 (5V Logic) TTL 半双工异步串行通信 (8bit, 1stop, No Parity) |
| ID | 253 ID (0 ~ 252) |
| 反馈信息 | 位置、速度、电流、实时时钟、运动轨迹、温度、输入电压等 |
| 外壳材质 | 全金属 |
| 齿轮材质 | 全金属齿轮、双轴承 |
| 待机电流 | 17 [mA] |
| ID | 253 ID (0 ~ 252) |
此次 ROBOTIS HAND HX5 灵巧手登陆中国,将进一步推动人形机器人、具身智能、工业自动化等领域的末端执行能力升级,以高灵巧、高可靠、高感知的核心优势,为科研与产业应用提供成熟解决方案。
选择智能佳,就是选择放心、专业与可靠!
智能佳机器人
400 099 1872
010-82488500/82488501
www.bjrobot.com



