 400-099-1872
400-099-1872





用低成本硬件学习细粒度双手操作
摘要精细的操作任务,如穿线扎带或插电池,对机器人来说是出了名的困难,因为它们需要精度、接触力的仔细协调和闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这可能很昂贵,也很难设置。学习能否使低成本和不精确的硬件能够执行这些精细的操作任务?我们提出了一种低成本的系统,该系统直接从真实演示中执行端到端的模仿学习,并使用自定义的遥操作界面进行收集。然而,模仿学习也带来了自身的挑战,尤其是在高精度领域:随着时间的推移,策略的误差可能会加剧,偏离训练分布。为了应对这一挑战,我们开发了一种新的算法“变形金刚行动区块”(ACT),该算法通过简单地预测区块中的行动来减少有效范围。这使我们能够学习困难的任务,例如打开半透明的调味品杯和插入电池,成功率为80-90%,只需10分钟的演示数据。
远程操作系统
[硬件教程]
[ALOHA代码库]
机械臂中国区供应商:北京智能佳科技有限公司 (www.bjrobot.com)
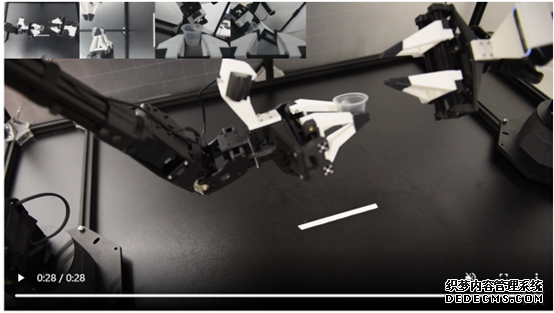
我们介绍ALOHA: 一种用于双手动远程操作的低成本开源硬件系统。它能够远程操作精确的任务,如穿拉链,动态任务,如玩乒乓球,以及丰富的接触任务,如在NIST板2中组装链条。
学习算法
[ACT+模拟代码库]
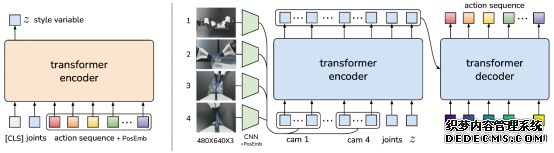
我们介绍了变形金刚的动作方块(ACT)。关键的设计选择是预测一系列动作(“动作块”),而不是像标准的行为克隆那样预测单个动作。ACT策略(图:右)被训练为条件VAE(CVAE)的解码器,即生成模型。它使用变换器编码器合成来自多个视点、联合位置和风格变量的图像,并使用变换器解码器预测一系列动作。CVAE的编码器(图:左)将动作序列和联合观测压缩为动作序列的“样式”。它也通过变压器来实现。在测试时,CVAE编码器被丢弃,并简单地设置为先前的平均值(即零)。
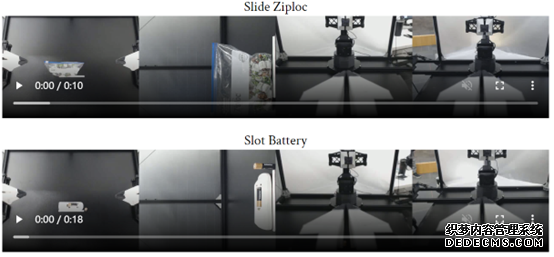
下面的视频展示了ACT政策的实时推出,模仿了每项任务的50个演示。ACT策略直接预测50Hz的联合位置,固定块大小为90。从长远来看,这一集的长度在600到1000之间。为了训练和测试,我们沿着15厘米的白色参考线随机选择物体的位置。对于以下四项任务,ACT分别获得96%、84%、64%和92%的成功率。




反应性
ACT策略可以对新的环境扰动做出反应,而不仅仅是记忆训练数据。
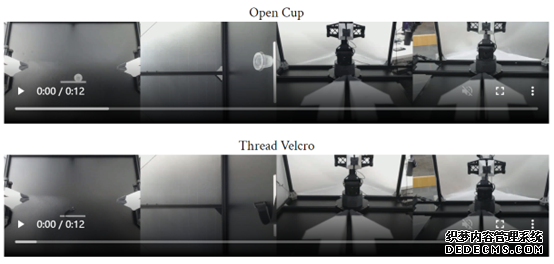
开杯
鲁棒性
ACT政策对一定程度的干扰也很有效,如下面的视频所示。
槽式电池

政策执行期间的观察
我们展示了评估时的示例图像观察结果(即ACT策略的输入)。总共有4个RGB摄像机,每个摄像机的分辨率为480x640。其中两个摄像头是文具,另外两个安装在机器人的手腕上。

待续.......
智能佳机器人
400 099 1872
www.bjrobot.com
购买链接:智能佳(ZNJ) ViperX 300 6DOF自由度机械臂 Dynamixel X系列伺服舵机 ViperX 300 6DOF【图片 价格 品牌 报价】-京东 (jd.com)
智能佳(ZNJ) WidowX 250 机械臂 6DOF自由度 更高扭矩 智能机械手 6DOF【图片 价格 品牌 报价】-京东 (jd.com)

