 400-099-1872
400-099-1872






视频请看:https://www.bilibili.com/video/BV1DxDhBYES6/
智能佳机器人(www.bjrobot.com)——ROBOTIS中国区资深合作伙伴!
作为 ROBOTIS 中国区正规授权经销商,同时也是 ROBOTIS 中国区第一位的合作伙伴,北京智能佳科技有限公司自 2007 年开启合作至今,始终坚守正规渠道承诺:旗下所有 ROBOTIS 产品均为 100% 官方正品,货源可全程追溯,正品保证、质优价廉,兼具官方品质保障与高性价比优势。
深耕机器人领域多年,北京智能佳科技有限公司拥有专业技术团队,渠道正规、售后服务完善,为您提供全流程服务支持 —— 从售前选型咨询,到售后技术答疑,全程护航您的采购与使用体验。
如需采购 ROBOTIS 系列产品,建议通过以下官方正规渠道下单,充分保障自身权益无忧。
京东智能佳机器人专营店:http://bjrobot.jd.com
淘宝智能佳机器人店铺:http://bjrobot.taobao.com
淘宝智能佳机器人官方店铺:http://shop240598203.taobao.com/index.htm

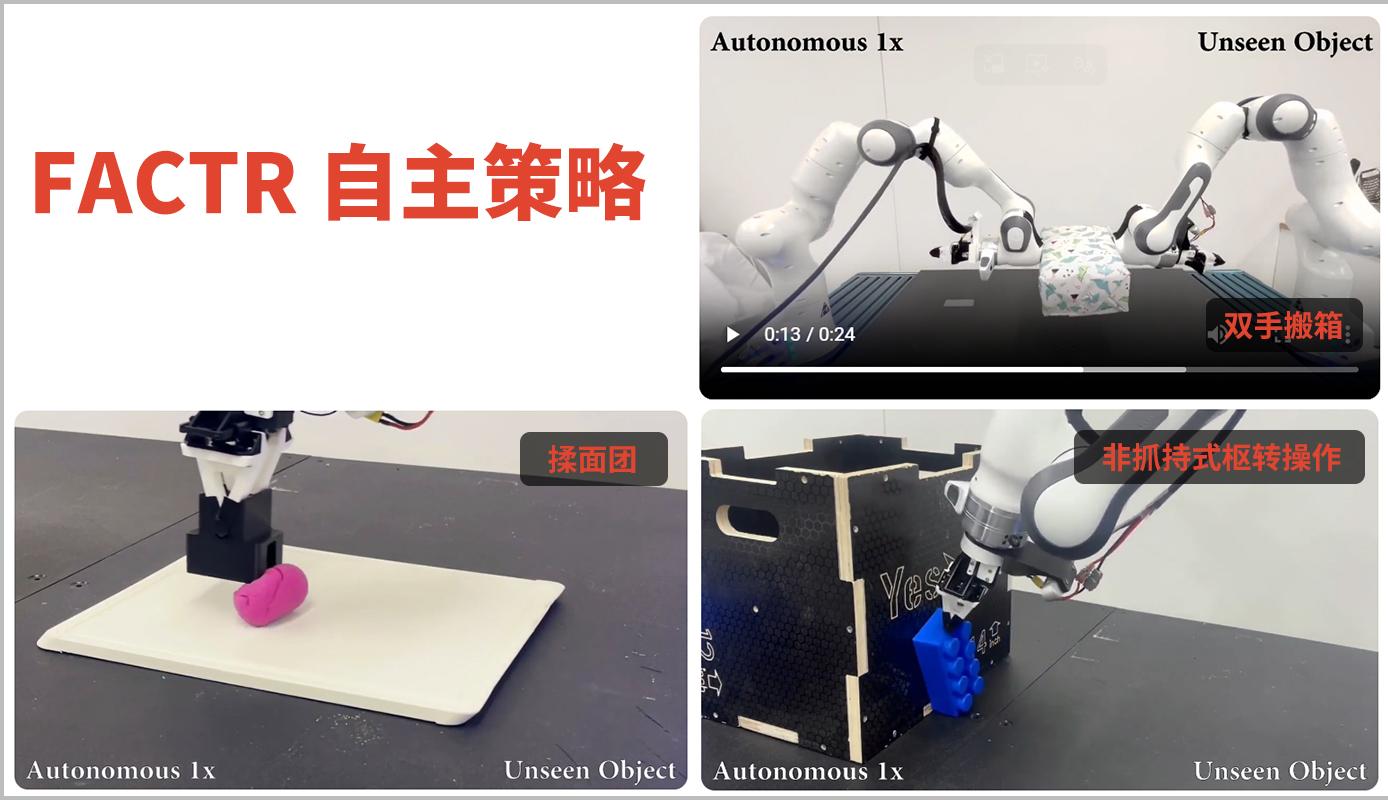
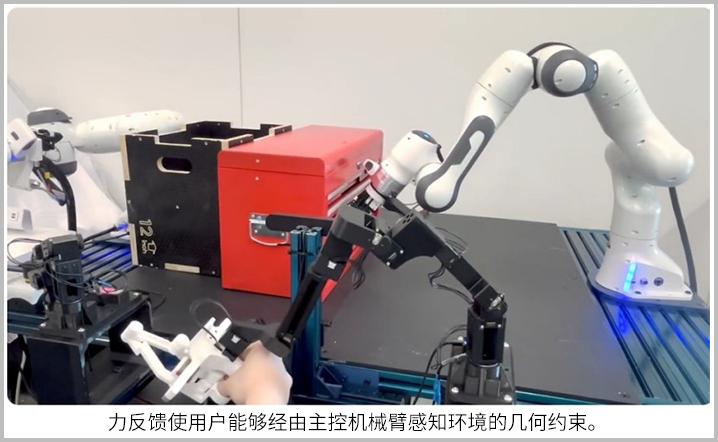
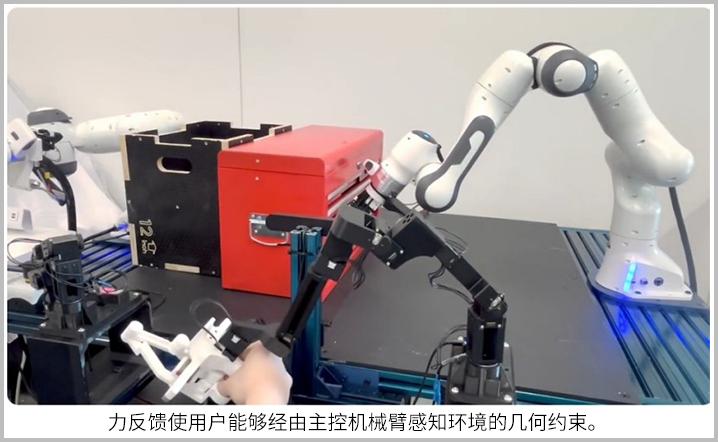
人类完成的箱体搬运、面团揉制等高接触性任务,均需依托力反馈实现可靠执行。此类力信息在多数机械臂中可便捷获取,却未广泛应用于遥操作与策略学习场景,导致机器人行为仅局限于无需复杂力反馈的准静态运动学任务。
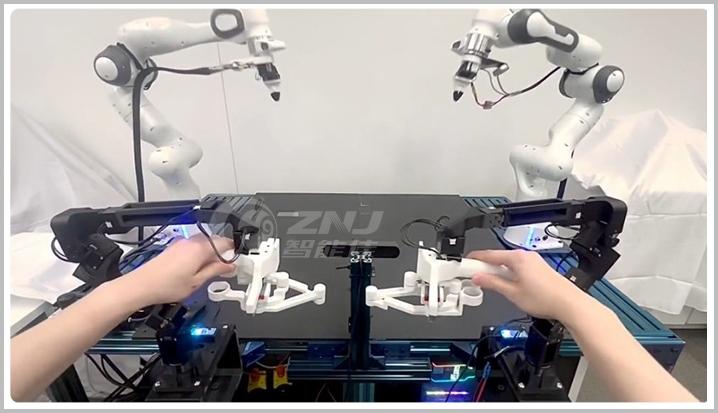
针对这一行业痛点,本方案率先推出低成本、直观式双向遥操作装置,可将从动臂所受外力实时反馈至主操作臂,为高接触性复杂任务的数据采集提供高效解决方案;同时创新提出FACTR 策略学习方法,搭载课程学习机制,在训练过程中逐步降低视觉输入的干扰强度,有效规避基于 Transformer 的策略模型对视觉输入过拟合问题,引导模型精准聚焦力模态信息。

实验验证:相较于未采用课程学习的基准方法,本方案通过充分挖掘力信息价值,使机器人对未知物体的泛化性能显著提升 43%。
产品配置清单
| 名称 | 数量 |
| XM430-W210-T舵机 | 2 |
| XC330-T288-T舵机 | 6 |
| HN12-I101 副舵盘 | 2 |
| ZNJ U2D2转换器 | 1 |
| ZNJ U2D2 PHB供电板 | 1 |
| 12V10A电源适配器 | 1 |
| FPX330-S102 4Pcs结构件 | 1 |
| 全套3D打印件 (黑色) | 1 |
| 螺丝螺母等连接件套件 | 1 |

FACTR 自主策略
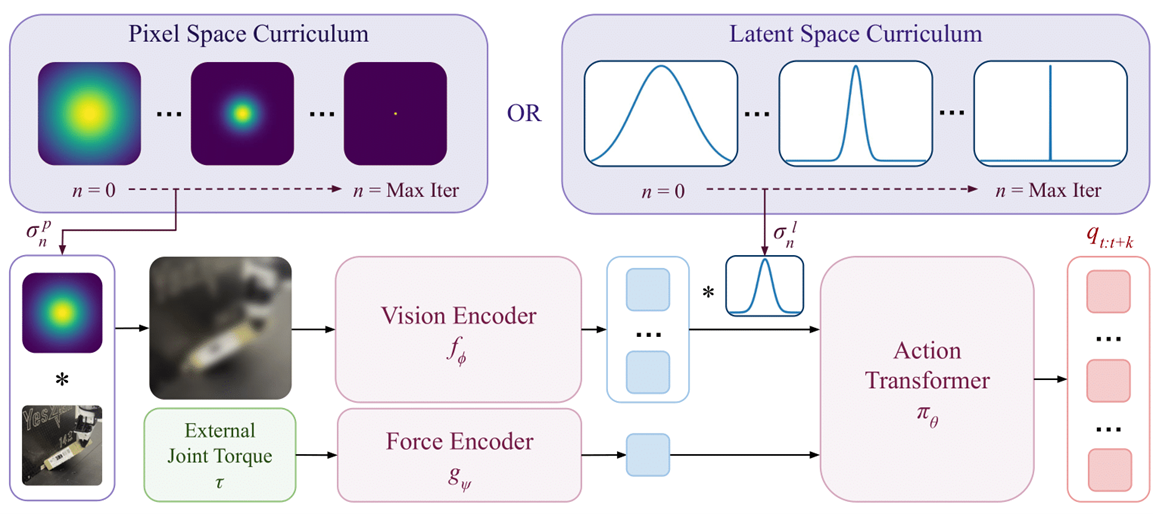
FACTR 可实现力反馈信息的高效融合,同时规避视觉信息过拟合问题,大幅提升机器人对未知视觉外观、几何形态物体的泛化能力。
该方法通过在像素空间或隐空间中施加尺度为 σ?的模糊算子实现:训练初期采用高强度模糊,随训练进程逐步衰减模糊强度。
FACTR 特点
力反馈功能
针对 7 自由度机械臂,未经调控的关节空间在遥操作过程中,易因运动学冗余性受重力影响,漂移至非理想构型。
本系统采用零空间投影控制律,可基于用户设定的 “静止姿态” 完成运动学冗余度解析;该控制律从构造原理上确保,无论机械臂处于何种构型,均不会对末端执行器施加额外作用力。

可定制化冗余度解析
针对 7 自由度机械臂,未经调控的关节空间在遥操作过程中,易因运动学冗余性受重力影响,漂移至非理想构型。
本系统采用零空间投影控制律,可基于用户设定的 “静止姿态” 完成运动学冗余度解析;该控制律从构造原理上确保,无论机械臂处于何种构型,均不会对末端执行器施加额外作用力。
演示效果:对主控机械臂肘部施加扰动时,零空间控制器可使其肘部自动回归默认姿态,且不影响末端执行器位姿。
不当静止姿态:易引发碰撞,凸显主臂自定义静止姿态配置的重要性;

恰当静止姿态:可辅助从臂精准抵达受限空间目标位置,有效规避碰撞风险。
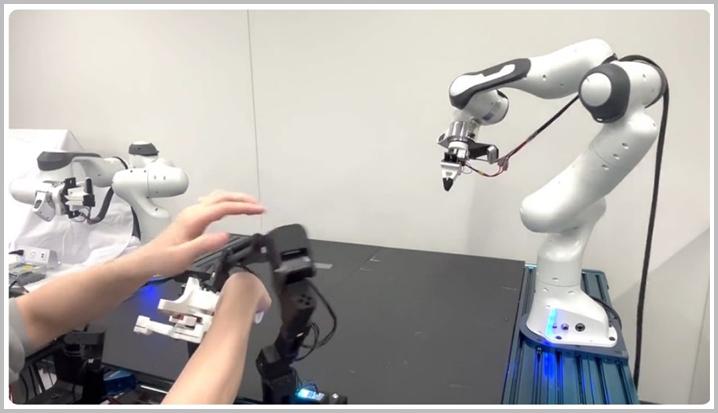
重力补偿
为主控机械臂搭载主动重力补偿技术,可在任意关节构型下实现空中悬停静止,支持操作者随时暂停 / 终止遥操作、自由释放主控臂,在双手协同遥操作场景中优势显著。
产品实物与开源资料中存在差异,以收到货物为准,图示仅供参考!
FACTR 关节电机
XM430-W210-T舵机
DYNAMIXEL- XM 系列基于高性能电流感应算法,提供了多种控制技术。
它采用铝制外壳,并采用了新技术,如空心电缆紧固结构,以方便用户使用。
· 6种操作模式(扭矩控制、速度控制、位置控制、扩展位置控制、基于电流的位置控制、PWM控制)· 轮廓控制,实现平滑运动规划· 改进型散热片,采用铝制外壳· 空心后盖设计,最小化电缆应力(三路布线)· 易于组装的简单结构· 节能(电流从100mA降低至40mA)· 与MX-28相比,体积减少了31%
| 名称 | XM430-W210-T(3pin) |
| 电机 | 无铁芯电机 |
 |
|
| 波特率 | 9,600 [bps] ~ 4.5 [Mbps] |
| 操作模式 |
电流控制模式 速度控制模式 位置控制模式 (0 ~ 360 [°]) 扩展位置控制模式 (多圈) 基于电流的位置控制模式 PWM控制模式(电压控制模式) |
| 重量 | 82 [g] |
| 尺寸 (W x H x D) | 28.5 x 46.5 x 34 [mm] |
| 减速比 | 212.6 : 1 |
| 堵转扭矩 |
2.7 [N.m] (at 11.1 [V], 2.1 [A]) 3.0 [N.m] (at 12.0 [V], 2.3 [A]) 3.7 [N.m] (at 14.8 [V], 2.7 [A]) |
| 空载转速 |
70 [rev/min] (at 11.1 [V]) 77 [rev/min] (at 12.0 [V]) 95 [rev/min] (at 14.8 [V]) |
| 工作温度 | -5 ~ +80 [°C] |
| 输入电压 | 10.0 ~ 14.8 [V] (推荐 : 12.0 [V]) |
| 通讯讯号 | TTL 电平多点总线 |
| 外壳材料 | 金属(正面、中间) 工程塑料(背面) |
| 齿轮材料 | 金属 |
| 待机电流 | 40 [mA] |
XC330-T288-T舵机
XC330系列是XL330系列的升级版。它采用了金属齿轮和轴承,从而增强了耐用性。
1. 多种操作模式速度控制、位置控制、扩展位置控制、PWM控制、电流控制、基于电流的位置控制
2. 轮廓控制,实现平滑的运动规划
3. 输入电压:6.5V~12V(推荐11.1V)
4. 采用金属齿轮和轴承增强耐用性
5. 无需额外转换设备即可支持RC协议
6. 降低电流,实现节能
| 产品 | XC330-T288-T |
| 电机 | 无芯直流电机 |
 |
|
| 波特率 | 9,600 [bps] ~ 4 [Mbps] |
| 操作模式 |
电流控制模式 速度控制模式 位置控制模式(0 ~ 360 [°]) 扩展位置控制模式(多圈) 基于电流的位置控制模式 PWM控制模式(电压控制模式) |
| 重量 | 23 [g] |
| 尺寸(W x H x D) | 20.0 x 34.0 x 26.0 [mm] |
| 减速比 | 288.35 : 1 |
| 堵转转矩 |
0.76 [N.m] (at 9.0 [V], 0.61 [A]) 0.92 [N.m] (at 11.1 [V], 0.80 [A]) 1.00 [N.m] (at 12.0 [V], 0.88 [A]) |
| 无负载转速 |
52 [rev/min] (at 9.0 [V]) 65 [rev/min] (at 11.1 [V]) 71 [rev/min] (at 12.0 [V]) |
| 工作温度 | -5 ~ +70 [°C] |
| 输入电压 | 6.5 ~ 12.0 [V] (推荐 : 11.1 [V]) |
| 外壳材料 | 工程塑料 |
| 齿轮材料 | 全金属齿轮 |
| 待机电流 | 17 [mA] |
获取资料:https://jasonjzliu.com/factr/
选择智能佳,就是选择放心、专业与可靠!
智能佳机器人
400 099 1872
010-82488500/82488501
www.bjrobot.com



